 咨詢電話: 187-1797-6220
咨詢電話: 187-1797-6220
咨詢電話: 187-1797-6220
咨詢電話: 187-1797-6220


— 企業新聞 —
大中電機歡迎您 全國免費客服電話 187-1797-6220
全國免費客服電話 187-1797-6220
地址:上海市松江區莘磚公路399弄
電話:021-6992-5088
手機:187-1797-6220 朱經理
郵箱:18717976220@163.com
發布時間:2021-03-24 16:01
伺服電機是控制伺服系統中機械元件運行的發動機,是輔助電機的間接變速裝置。伺服電機可以精確控制速度和位置,并將電壓信號轉換成扭矩和轉速來驅動被控對象。伺服電機轉子速度由輸入信號控制,并能快速響應。在自動控制系統中,它作為執行機構,具有機電時間常數小、線性度高、啟動電壓低等特點。它可以將接收到的電信號轉換成電機軸上的角位移或角速度并輸出。它分為兩類:DC伺服電機和交流伺服電機。它的主要特點是信號電壓為零時,沒有旋轉現象,轉速隨著扭矩的增加而勻速下降。

什么是伺服電機?

伺服電機又稱執行電機,它將輸入電壓信號轉換成轉軸的角位移或角速度。改變輸入信號的大小和極性可以改變伺服電機的速度和轉向,輸入電壓信號也稱為控制信號或控制電壓。

伺服電機種類繁多,應用廣泛。例如,在雷達天線系統中,雷達天線由交流伺服電機驅動。當天線發射的無線電波遇到目標時,會被反射并發送給雷達接收機;雷達接收機確定目標方位和距離后,向交流伺服電機發出電信號,交流伺服電機根據電信號驅動雷達天線跟蹤目標。
伺服電機根據電源的不同分為DC伺服電機和交流伺服電機。DC伺服電機輸出功率大,功率范圍1 ~ 600瓦,有的甚至達到千瓦;但交流伺服電機輸出功率較小,功率范圍一般為0.1 ~ 100瓦。

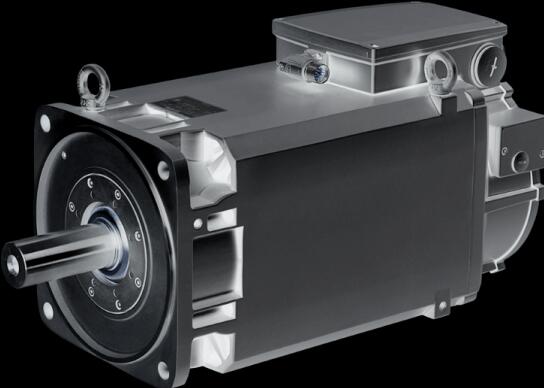
伺服電機內部結構
伺服電機可以精確控制速度和位置,并將電壓信號轉換成扭矩和轉速來驅動被控對象。伺服電機轉子速度由輸入信號控制,并能快速響應。在自動控制系統中,它作為執行機構,具有機電時間常數小、線性度高、啟動電壓低等特點。它可以將接收到的電信號轉換成電機軸上的角位移或角速度并輸出。它分為兩類:DC伺服電機和交流伺服電機。它的主要特點是信號電壓為零時,沒有旋轉現象,轉速隨著扭矩的增加而勻速下降。
伺服電機的工作原理

1.伺服機構是一種自動控制系統,它使輸出控制量如物體的位置、方向和狀態跟隨輸入目標(或給定值)的任意變化。伺服主要靠脈沖定位。基本上可以理解為伺服電機接收到脈沖時,會旋轉一個與脈沖對應的角度,從而實現位移。由于伺服電機本身具有發送脈沖的功能,所以伺服電機每旋轉一個角度就會發出相應數量的脈沖,與伺服電機接收到的脈沖相呼應,或者稱為閉環。這樣,系統將知道有多少脈沖被發送到伺服電機,同時又有多少脈沖被接收回來。DC伺服電機分為有刷電機和無刷電機。無刷電機成本低,結構簡單,起動轉矩大,調速范圍寬,容易控制,需要維護,但維護(換碳刷)不方便,產生電磁干擾,對環境有要求。因此,它可以用于對成本敏感的普通工業和民用場合。
無刷電機體積小、重量輕、輸出大、響應快、速度快、慣性小、轉動平穩、扭矩穩定。控制復雜,容易實現智能化。其電子換向方式靈活,可以是方波換向,也可以是正弦波換向。該電機免維護,效率高,工作溫度低,電磁輻射低,使用壽命長,可用于各種環境。
2.交流伺服電機也是無刷電機,分為同步電機和異步電機。目前運動控制一般采用同步電機,功率范圍大,可以實現大功率。慣性大,最大轉速低,隨功率增加迅速下降。所以適合低速穩定運行。
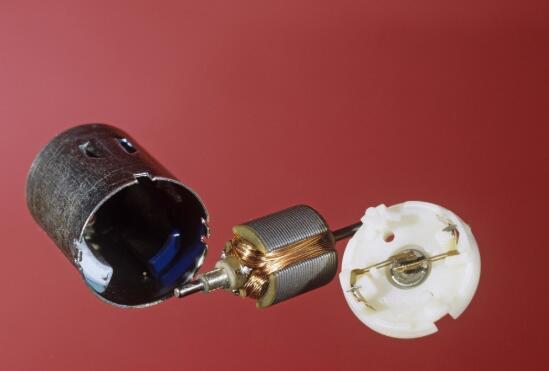
3.伺服電機內部的轉子是永磁體。驅動器控制的U/V/W三相電形成電磁場,轉子在這個磁場的作用下旋轉。同時,電機的編碼器將信號反饋給驅動器,驅動器將反饋值與目標值進行比較,以調整轉子的旋轉角度。伺服電機的精度取決于編碼器的精度(行數)。
交流伺服電機和無刷DC伺服電機的功能區別:交流伺服更好,因為是正弦波控制,所以轉矩脈動小。DC伺服是梯形波。但是DC伺服簡單又便宜。
43px;" />
伺服可作為交流或直流電動機。早期一般伺服直流電動機,因為只有類型的控制大電流是通過序列多年。隨著晶體管成為能夠控制大電流和開關的大電流在更高的頻率,交流伺服電機成為更經常地使用。早期伺服是專為伺服放大器。今天,一類是電機設計的應用,籌措,可能使用伺服放大器或變頻控制器,這意味著電動機可用于伺服系統在一個應用程序,并使用變頻驅動器在另一應用程序。有些公司還要求任何閉環系統,不使用步進電機伺服系統,所以它是可能的一個簡單的交流感應電機是連接到一個速度控制器,被稱為伺服電機。
有些變化,必須作出任何運動,目的是作為伺服在cludes的能力,運作了一系列的速度沒有過熱,運作的能力在零速度和保持足夠的轉矩舉行負荷的立場,運作能力在非常低的速度很長時間沒有過熱。老年型發動機冷卻風扇已是直接連接到電機軸。當電機運行速度緩慢,風扇不會移動足夠的空氣冷卻的發動機。較新的發動機有一個單獨的風機安裝,以便將提供最佳的冷卻空氣。這扇是由常數電壓源,以便它反過來將在最大轉速在任何時候都不管的速度伺服。其中最實用類型的電機伺服系統是永久磁鐵(下午)型發動機。電壓為外地繞組永磁型電機可以交流電壓或直流電壓。永磁型電機類似于其他類型電機下午以前提出。圖11-83顯示了剖圖片的永磁電機和圖。 11-84顯示了剖圖的永磁電機。從圖片和圖表可以看到住房,轉子和定子都期待非常相似,前型永磁電動機。主要的差異這種類型的發動機,它可能減少齒輪能夠將更大的負荷迅速從一個站著不動的位置。這種類型的永磁電機也有一個編碼器或解析器內置馬達的住房。這確保了設備將準確地表明了立場或速度的電機軸。
無刷伺服無刷伺服電機的目的是開展活動,刷子。這意味著,減刑的刷子提供現在必須以電子方式提供。電子減刑是由開關晶體管和關閉在適當時候。圖11-85表明三個例子的電壓和電流波形發送到無刷伺服電機。圖11-86顯示一個例子,這三個繞組的無刷伺服電機。主要的一點無刷servomo因子是,它可以采用任何交流電壓或直流電壓。
圖11-85顯示三種類型的電壓波形,可用于功率無刷伺服電機。圖11 - 85a顯示了梯形電動勢(電壓)輸入和方波電流輸入。圖11 - 85b顯示波形的正弦輸入電壓和方波電流波形。圖11 - 85C號顯示了正弦輸入波形和正弦電流波形。正弦輸入和正弦電流波形是最受歡迎的電壓用品的無刷伺服電機。
圖11-86表明三套晶體管類似的晶體管輸出級的變頻驅動器。在圖。11-86a晶體管相連的三個繞組電機以同樣的方式在變頻驅動器。在圖。一升-86b圖的波形的輸出晶體管表現為三個不同的正弦波。波形的控制電路為基礎,每一個transis器中顯示圖。11-86c。圖11-86d表明了反電勢的驅動波形。
圖11-85 (a)陷阱ezoidal輸入電壓和方波電流波的形式。(b)正弦輸入電壓和正弦電壓和方波輸出電壓波的形式。(c)正弦輸入電壓和sinusoi達電流波形。這已成為最流行的類型的無刷伺服控制。
伺服控制器
伺服控制器已成為不僅僅是放大器的伺服電機。今天,伺服控制器必須能夠作出了一系列決定,并提供一種手段,接收信號來自外部傳感器和控制系統中,并發出信號,主機控制器和PLC的接口,可能與伺服系統。圖11-87顯示了圖片的幾個伺服電機和放大器。各組成部分在這個圖片看起來類似的各種其他類型的電機和控制器。
圖11-88顯示了圖伺服控制器,以便您可以看到一些分歧與其他類型的電機控制器。該控制器在此圖是直流伺服電機。該控制器有三個港口,使信號或發送信號的控制器。電源供應器,伺服電機,和轉速表連接到端口P3底部的控制器。你可以看到,電源電壓為115伏單相交流。一個主要的斷開連接的一系列與李線。在李和N線路供電的隔離降壓變壓器。二次電壓跨前可以是任何電壓的20和85伏特。該控制器接地端8 。你應該記住,地面在這一點上是用來提供短路保護所有金屬部件的系統。
該伺服電機連接到終端控制器在第4和第5 。終端5 +和終端4 -。 3號候機樓提供了地面的屏蔽的連接線,電機和控制器。在轉速表連接到終端1和2 。 2號候機樓是+和終點站1 -。在此盾構電纜接地電動機案件。電線連接到這個港口將大于導線連接到其他港口,因為它們必須能夠攜帶更大的電機電流。如果電動機采用了外置散熱風扇,這將是連接通過這個港口。在大多數情況下,冷卻風扇將采用單相或三相交流電壓保持在恒定的水平,如110伏或240伏。
圖11-86 (a)sistors連接到三個繞組的無刷伺服電機。(b)波形的三個獨立的電壓,用于功率電機的三個風消息。(c)波形的信號用來控制晶體管序列,提供了波形圖前,(d)波形的整體反電勢。
圖11-88圖的伺服控制器。此圖顯示的數字(開關)信號和模擬信號發送到控制器,以及信號控制器傳送回主機控制器或PLC 。
該命令的信號被送到控制器通過港口。該終端的指揮信號的1和2 。 1號候機樓是+和終端2 -。這種信號是一種信號,這意味著它不是停飛或不同意的理由可能同任何其他部分的電路。一些額外的輔助信號也通過端口連接1 。這些信號包括抑制(異煙肼) ,這是用來停用駕駛從外部控制器,并正向和反向的命令(剛果和吸波涂層) ,其中向控制器發出電壓電機,使之將在旋轉向前或扭轉方向化。在某些應用中,最大的旅行著限位開關和反向最大的旅行限位開關連接,如果旅行的機器動作的極端位置,以便它觸及了overtravel限位開關,它會自動激發干勁,開始旅行相反的方向發展。
港口還提供了幾個數字輸出信號,可以用來發送故障信號或其他信息,如“驅動器運行”回到主控制器或PLC。港口基本上是界面的全數字化(開關)信號。
港口的P2是界面的模擬( 0 -最大值)的信號。典型的信號,這車包括電機電流和電機速度信號,傳送至伺服控制器到主機或公司,在這里他們可以用來驗證邏輯,以確保控制器發出正確的信息的馬達。輸入信號從主機或PLC還可以被發送到控制器設置最大電流和速度的驅動器。在新的數字驅動器,這些值控制的驅動器參數,編程到驅動器。
相關推薦
在線留言




